Arbetsmetod för kontroll av Beversystemets nogrannhet
Vid användandet av datoriserade rikt- och positioneringshjälpmedel krävs att systemets noggrannhet kontinuerligt kontrolleras för att minimera avvikelelserna. Detta kan göras på flera sätt. Nedan beskrivs hur kontrollen genomfördes, samt hur stora avvikelserna var i Håbo.
Följande kontroller genomfördes:
Om avvikelserna vid kontrollen visade sig vara onormalt stora vidtogs åt- gärder som t ex kalibrering av den felaktiga bommen eller justering av borr- planen.
Inmätning av bommarna
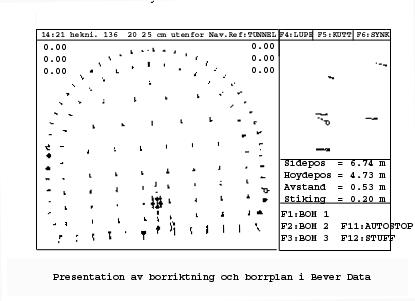
Den första kontrollen som genomfördes var att mäta in bommarnas positioner vid olika lägen i salvan och jämföra med positionerna som Bever systemet angav. Detta gjordes innan tunneln hade börjat drivas för att konstatera vilka avvikelser som fanns.
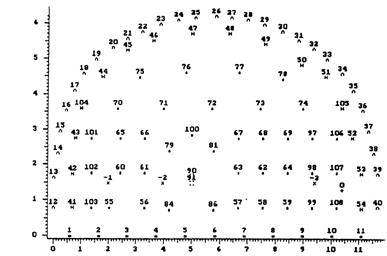
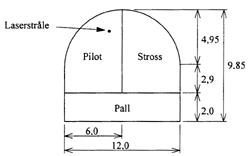
Resultaten visade en viss nedböjning i y-led som var störst i anfang och konturhålen i botten. Inga åtgärder vidtogs, då nedböjningen inte inkräktade nämnvärt på konturen. Däremot upptäcktes en ovanligt stor avvikelse i x-led på en bom, vilket åtgärdades genom kalibrering.
Manuell utsättning av de första salvorna
De första salvorna i tunneln sattes ut manuellt genom att borransättningslinjen målades ut på stuffen. Därigenom erhölls en okulär kontroll av noggrannheten hos Beversystemet. Detta skapar också ett förtroende för systemet hos borraren då han ser att borrhålen hamnar rätt när han manövrerar m h a Bevern.
Inmätning av konturhål
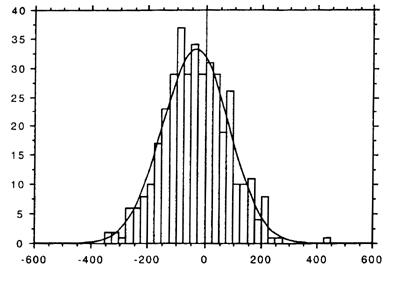
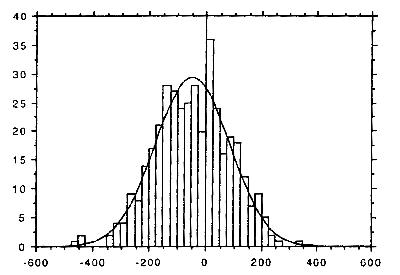
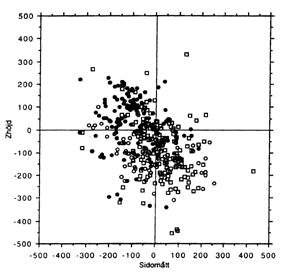
Kontrollen under drift bestod av att mäta in konturhål på piloten respektive strossen och sedan jämföra x- och y-värden med de av Bever Controlens loggade värden. Totalt mättes 16 piloter och 17 strossar in.
Utvärdering av mätvärden
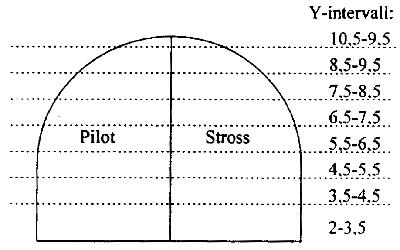
För att studera hur avvikelserna varierar utefter konturen delades salvan in i olika y-intervall enligt nedan.